3.1方案简述
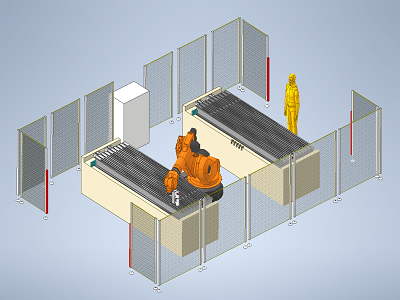
本方案由一套六轴工业机器人,1套轴向力控+1套径向力控+电主轴,1套2D视觉定位软硬件(可选项),若干个仿形钢丝刷,1套毛刷换刀区,2套工作平台,1套控制柜组成
工艺要求:钢丝刷必须从开槽口处进入横梁内部打磨,且开槽口的位置不固定,如果开槽口的位置在10种以内,建议采取示教编程的办法,编辑相应的开槽口进入程序,如果开槽口位置大于10种,且同一工作台上的10根横梁开槽口位置都不一样,则需要加装2D视觉定位软硬件,用于识别开槽口位置‘
3.2工作流程
1)人工将工件放置在1#工作平台上,定位准确;(统一将工件滑槽开口的一面朝上放置)
2)机器人移动至1#工作平台的位置,通过机械臂末端的力控电主轴+仿形钢丝刷对产品进行打磨作业,仿形钢丝刷采用和横梁内截面相同的形状,且外形尺寸略大于横梁内截面尺寸,保证钢丝刷对内截面各个接触面都有充分的接触,同时,径向浮动电主轴可以补偿因钢丝刷磨损造成的局部接触不到的情况;
3)机器人定期移动至钢丝刷换刀区处,通过电主轴自动松刀和锁紧装置在直列刀库中拾取新的耗材;
4)在机器人对1#工作平台的工件进行打磨处理的期间,人工对 2#工作平台进行上/下料:
5)机器人完成1#工作平台的打磨工作后,移动至 2#工作平台处对新上的工件进行加工:
6)人工对1#工作平台已加工好的工件进行下料,终检;
7)以上动作反复自动运行。








 当前位置:
当前位置:
 地址:北京市大兴区中关村科技园区大兴生物医药产业基地天华大街9号
地址:北京市大兴区中关村科技园区大兴生物医药产业基地天华大街9号 手机:13082557025
手机:13082557025 电话:13082557025
电话:13082557025 QQ:1299773098
QQ:1299773098 微信:steelcnc
微信:steelcnc